
A mikrorobotika egyik viszonylag új trendje, hogy mobil robotokhoz puha aktuátorokat használnak. Az aktuátorok kulcsszereplők a robotikában: a vezérlő algoritmus kimenő jeleit ők alakítják konkrét cselekvéssé.
A puha anyagok rugalmasságuk miatt népszerűek. Sok fejlesztő viszont még mindig szkeptikus, repülő szerkezetekhez nem tartják alkalmasnak őket. Az ok: az aktuátorok nem elég masszívak, nehéz az irányításuk.
Harvardi kutatók fejlesztése, egy robotméh (RoboBee) rácáfol a kételkedőkre. A puha mesterséges izmokat tartalmazó szerkezet falnak rohanhat, leeshet a talajra, összeütközhet más „méhecskével”, mégsem sérül meg.
Masszív is, és a vezérlésével sincsenek gondok. Mi több, az első puha aktuátorokkal működtetett, kontrollált repülésre képes mikrorobotként vonul be a technikatörténelembe.
Az aktuátorokat az áramot nem vezető, rendkívül jól szigetelő, elektromos térben deformálódó elasztomerből készítették. Az elektródák áramvezetését javítva, a kutatók 500 Hertzen működtették az aktuátorokat. Ugyanúgy funkcionáltak, mint a korábbi hasonló robotokba épített, kemény anyagokból álló elődeik.
Puha aktuátorokat tartalmazó rendszerekkel előfordul, hogy behorpadnak, elgörbülnek, és a rendszer elveszíti stabilitását. Ezt kiküszöbölendő, nagyon könnyű repülőgépvázat építettek, a robot görbülését, elhajlását megakadályozó, korlátozó szállal.

Kisméretű robotokban az aktuátorok könnyen összeszerelhetők, cserélhetők. A többféle repülési lehetőség szemléltetésére többféle modellt építettek. A kétszárnyú változat fel tud emelkedni a talajról, de tovább nem irányítható. A négyszárnyú és két aktuátoros verzió zsúfolt környezetben is repül, egyetlen út alatt több ütközést kerül el. Összességében a kicsi és könnyű robotok egyik nagy előnye, hogy rugalmasak külső hatásokkal szemben.
A puha aktuátorok azért is hasznosak, mert a körülményekhez jobban alkalmazkodnak, mint a hagyományosak. Komoly szolgálatot tehetnek, ha a robotnak például keresési-mentési műveletben kőtörmelék között kell navigálnia.
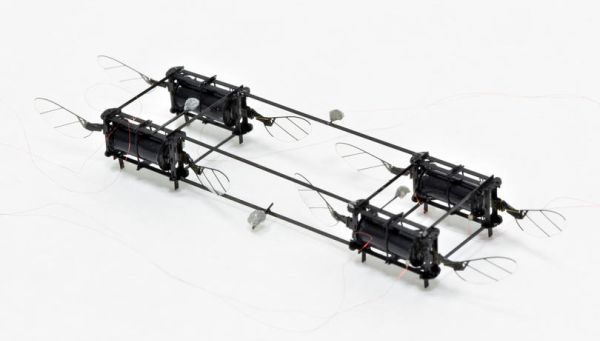
A harmadik változat, egy nyolcszárnyú, négy aktuátoros modell lebegő repülésre is képes.
Következő lépés a hatékonyság növelése. Szükség lesz rá, mert a „puha gépek” ezen a téren jócskán le vannak még maradva.
„Ha sikerül kiváló teljesítményű mesterséges izmokat fejlesztenünk, csak a csillagos ég lehet a határ, a robotok kvázi mindenre képesek lesznek” – összegez Robert Wood, az egyik fejlesztő.




