
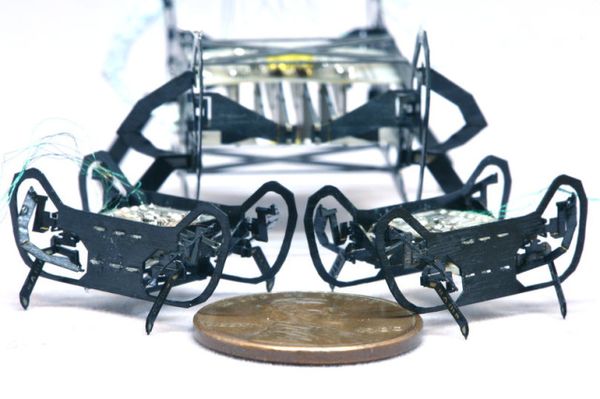
Harvardi kutatók tovább zsugorították az egyébként is pirinyó Harvardi Járó Mikrorobotot. A rovarvilág egyik legnépszerűtlenebb fajtájáról, a csótányról mintázott következőgenerációs gépecske nem sokkal nagyobb egy százforintosnál, viszont méretéhez képest meglepően sebesen mozog.
Egy másodperc alatt testhosszának 13,9-szeresét képes megtenni, és ezzel a tempóval nemcsak az egyik legkisebb mikrorobot, hanem egyben az egyik leggyorsabb is. Fejlesztői szerint méretéhez viszonyítva, a legügyesebbek között szintén ott a helye.
A HAMR-JR névre hallgató szerkezet feleakkora, mint elődje. Az elődöt a kutatók megtanították úszni és víz alatt járni. Az ezekkel a különleges adottságokkal nem rendelkező Juniort részben azért hozták létre, hogy teszteljék: az origami által inspirált gyártófolyamat alkalmazható-e többféle méretű robotokhoz. HAMR és más mikrorobotok, például a fallal történő ütközést is jól tűrő Robotméh ugyanezzel a technikával készültek.
A fejlesztők a pici botoktól a nagy ipari robotokig ívelő, kvázi mindent lefedő gépskálára gondoltak. Pozitív eredményt értek el: minden az elképzeléseik szerint történt, és az eredeti terv komplexitásából a mikro mérettartományban sem kellett engedniük.
„A kísérletben az volt a csodálatos, hogy semmit nem kellett változtatnunk az előző terven. Bebizonyítottuk, hogy az eljárás lényegében bármilyen eszközre és különféle méretekben is alkalmazható” – jelentette ki Kaushik Jayaram, a robotot ismertető tanulmány elsőszámú szerzője.
Látni akarták azt is, hogy a zsugorodás milyen mértékben befolyásolja a gép futósebességét és más adottságait. A négylábú Juniort 2,25 centi szélesre és 0,3 grammra kicsinyítették. Hasonló méretű rovarok mozgását utánozva, „kocogni”, ugrálni, leállni, jobbra és balra fordulni és hátrafelé mozogni egyaránt képes.
„Az ekkora robotok túlnyomó többsége csak a legalapvetőbb mozgásokat tudja megvalósítani. Bebizonyosodott, hogy az ügyességből vagy a vezérlésből semmit sem kell a méret miatt feláldozni” – magyarázza Jayaram.




