A Nemzetközi Űrállomáson (ISS) az asztronauták nemcsak egymással és a földi személyzettel, hanem robotokkal is folyamatosan kommunikálnak. A komplex ütemterveket és rendszereket az anyabolygóról kezelik.
Nem sokáig lesz így.
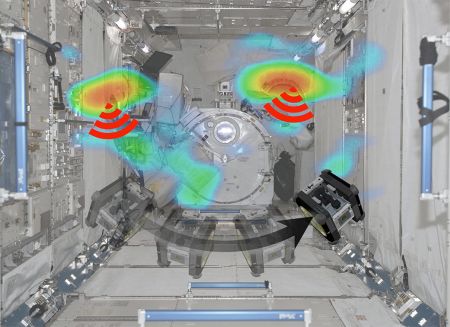
Áprilisban egy „döngicsélő” asztrorobot, Bumble az ISS-en szimulált anomáliát tesztelt. A szimulációban az állomás életfenntartó rendszere nagy széndioxid-koncentrációt észlelt. A valóságban ekkora koncentráció nagyon veszélyes lenne az ott dolgozó hét személyre.
A kockaformájú robot ügyesen navigált, megtalálta a légáramlásért felelős részeket, gépilátás-rendszerével automatikusan észlelte a levegő mozgását akadályozó objektumot, majd segítséget hívott. A következő teszten egy modult vizsgálva, nagyfelbontású, többszenzoros 3D térképet készített a környezetről.

Ezzel le is zárult az űrállomást automatikusan működtető robotikus és más rendszereket irányító szoftver, ISAAC (Integrated System for Autonomous and Adaptive Caretaking) első tesztfázisa.
A NASA-nál fejlesztett ISAAC hosszútávú rendeltetése, hogy űrhajókat autonóm robotrendszerekké alakítson át. A mélyűrben, a Földtől egyre messzebb, a Homo sapiens nem tölthet el annyi időt, mint az űrállomáson (ahol húsz éve állandó az emberi jelenlét).
Hogyan működhet rendeltetésszerűen nélkülünk egy űrhajó? ISAAC erre – karbantartásra, logisztikára, földi személyzettel való kommunikációra – talál ki a mainál jobb megoldásokat. Nagy szükség van rá, mert a jövő űrállomásain kevesebb ideig lesznek asztronauták, viszont éveken át fenn kell tartani, hatékonyan kell működtetni őket.
A hamarosan újabb teszteken áteső ISAAC ebbe a jövőbe enged betekintést. A második fázis során több robotot fog vizsgálni, személyzet nélküli űrállomásra személyzet nélküli űrhajóról szállítanak majd csomagokat. A harmadik, egyben utolsó fázis lesz a legnehezebb – az egyik kabinból levegő vagy füst szivárog, az anomáliákra valósidőben működő technikai javaslatokkal kell előállnia.