
Az ember meg tud markolni és forgatni tud tárgyakat úgy, hogy nem látja azokat. A San Diegói Kaliforniai Egyetem kutatóinak köszönhetően most már robotkéz szintén képes ugyanerre.
A kéz kicsi játékoktól, üdítődobozokig, sőt gyümölcsökig és zöldségekig, többfajta tárgyat forgat el puszta érintéssel, és közben egyiket sem karcolja, rongálja meg. A feladat kivitelezéséhez kizárólag érintés közben gyűjtött adatokat használ.
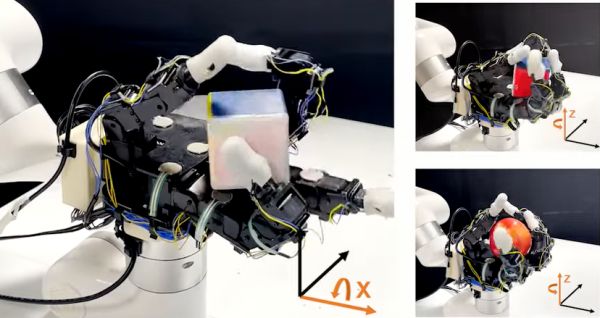
A négyujjas robotkéz széles területén, tenyerén és ujjain, elsősorban az ujjvégeken elosztott tizenhat érintésszenzor működik. Olcsó eszközök, darabonként tizenkét dollárba kerülnek, egyetlen rendeltetésük, hogy megállapítsák: hozzáért-e a kéz egy tárgyhoz, vagy sem.
A megközelítést az olcsó és alacsony felbontású, egyszerű bináris jeleket (igeneket és nemeket) használó érzékelők teszik egyedivé. A bevett gyakorlat, azaz nagyfelbontású és a robotkezeken kis területen elhelyezett, kevés szenzor működtetése drága.

Pedig ha kevés a szenzor, kevesebb az esély, hogy a kéz bármilyen tárggyal is kapcsolatba kerül, nagy felbontásuk miatt nehezen szimulálhatók, ráadásul drágák is, és nagy részük látást is használ. Összességében, nem praktikusak valóvilág-forgatókönyvekben. Mivel a feladat elvégzéséhez nincs szükség például textúra-információkra, bőven elegendők hozzá a bináris jelek. Ha a szenzor érzékeli őket, az információ a sikeres forgatáshoz épp eleget elárul a tárgy 3D szerkezetéről és elhelyezkedéséről.
A kezet szimulációban kezdték gyakoroltatni, változatos, köztük szabálytalan formájú tárgyakat is megérintett. A rendszer megállapította, melyik érzékelő, hol és mikor érintette meg az adott objektumot. A begyűjtött infók alapján már tudja, mire utasítsa a kezet.
Ezt követően jött a valódi kéz tesztelése, olyan tárgyakkal, amelyeket korábban nem érintett meg. Többet sikerült úgy forgatnia, hogy nem ejtette le. A komplexebbek mozgatását lassabban tanulta meg.
A fejlesztők jelenleg bonyolultabb feladatok kivitelezésén dolgoznak, a kéz például elkapni próbál tárgyakat.




