 Google-kutatók a természetesnyelv-feldolgozást és a gépi látást összekombinálva, új eszközt fejlesztettek robotok navigációjához: szöveges promptok és vizuális inputok alapján, belső térben történő tájékozódásra tanítottak meg egyet.
Robotok navigációjához a környezet feltérképezése mellett…
Google-kutatók a természetesnyelv-feldolgozást és a gépi látást összekombinálva, új eszközt fejlesztettek robotok navigációjához: szöveges promptok és vizuális inputok alapján, belső térben történő tájékozódásra tanítottak meg egyet.
Robotok navigációjához a környezet feltérképezése mellett…
Az Neumann Társaság blogja a legfejlettebb infokom technológiákról
Jelenből a Jövőbe
Szűk helyekre is benyomja magát CLARI, az apró alakváltó robotrovar
 Különleges robotot fejlesztettek a Boulderi Colorado Egyetemen. CLARI (Compliant Legged Articulated Robot Insect, ami kb. „engedékeny lábú ízelt robotrovar”) összenyomható, és az alakját képes úgy megváltoztatni, hogy nagyon szűk helyeken is elférjen.
A gép a biológiailag inspirált…
Különleges robotot fejlesztettek a Boulderi Colorado Egyetemen. CLARI (Compliant Legged Articulated Robot Insect, ami kb. „engedékeny lábú ízelt robotrovar”) összenyomható, és az alakját képes úgy megváltoztatni, hogy nagyon szűk helyeken is elférjen.
A gép a biológiailag inspirált…
Rendet rak a lakásban, és a mosásban is segít egy új robot
 Több egyetem (Princeton, Colombia stb.) szakembereiből álló kutatócsoport rendrakásra és a mosás előkészítésére is használható robotot fejlesztett. A TidyBot nevű szerkezet valóban takarosnak tűnik, mert speciális utasítások alapján összeszedi és a helyükre teszi a padlón heverő…
Több egyetem (Princeton, Colombia stb.) szakembereiből álló kutatócsoport rendrakásra és a mosás előkészítésére is használható robotot fejlesztett. A TidyBot nevű szerkezet valóban takarosnak tűnik, mert speciális utasítások alapján összeszedi és a helyükre teszi a padlón heverő…
Rohanó százlábúakról mintázott soklábú robotok
 A „százlábúak” gyors, ingadozó járásukról ismertek. Tíz vagy többszáz lábukkal bármilyen terepen áthaladnak. Amikor száguldani látjuk őket, az emberi mozgástól nagyon eltérő állatokat látunk. A mi mozgásunkat nagyrészt a tehetetlenség határozza meg – ha meglendítjük a lábunkat, nyomatékot helyezünk…
A „százlábúak” gyors, ingadozó járásukról ismertek. Tíz vagy többszáz lábukkal bármilyen terepen áthaladnak. Amikor száguldani látjuk őket, az emberi mozgástól nagyon eltérő állatokat látunk. A mi mozgásunkat nagyrészt a tehetetlenség határozza meg – ha meglendítjük a lábunkat, nyomatékot helyezünk…
Finomhangolt robottréning
 A robotika egyik nagy kihívása a szimuláció és a valóság közötti szakadék áthidalása. A Georgia Technológiai Intézet (GIT) és a Meta (Facebook) friss kutatása alapján, meglepő módon, a kevésbé élethű szimuláció lehet a megoldás. Ha a szimulációt leegyszerűsítjük, a valódi világot az elvárások…
A robotika egyik nagy kihívása a szimuláció és a valóság közötti szakadék áthidalása. A Georgia Technológiai Intézet (GIT) és a Meta (Facebook) friss kutatása alapján, meglepő módon, a kevésbé élethű szimuláció lehet a megoldás. Ha a szimulációt leegyszerűsítjük, a valódi világot az elvárások…
Kísérteties repülő drónok halott madarakból
 Elterjedtek a madarak létezését megkérdőjelező, bennük kormányok által működtetett drónokat látó összeesküvéselméletek. A valóság szerencsére nem igazolja őket, viszont tényleg fejlesztettek már részben halott galambok egyes testrészeiből működő, égi patkányként repülő prototípusokat.
A madárforma…
Elterjedtek a madarak létezését megkérdőjelező, bennük kormányok által működtetett drónokat látó összeesküvéselméletek. A valóság szerencsére nem igazolja őket, viszont tényleg fejlesztettek már részben halott galambok egyes testrészeiből működő, égi patkányként repülő prototípusokat.
A madárforma…
Homokos strandon fut a dél-koreai robotkutya
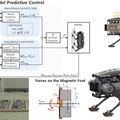
 A dél-koreai KAIST (Korea Advanced Institute of Science & Technology) kutatói homokos strandokon ügyesen keresztülmenő/futó négylábú robotkutyát fejlesztettek. A gép neve RaiBo.
Szimulálták a szemcsés talajból a robotra ható erőket, majd mesterséges ideghálón alapuló kontrollert terveztek…
A dél-koreai KAIST (Korea Advanced Institute of Science & Technology) kutatói homokos strandokon ügyesen keresztülmenő/futó négylábú robotkutyát fejlesztettek. A gép neve RaiBo.
Szimulálták a szemcsés talajból a robotra ható erőket, majd mesterséges ideghálón alapuló kontrollert terveztek…
Falon mászik Marvel, a dél-koreai robotkutya
 Szintet lépnek a robotkutyák.
A KAIST (Korea Advanced Institute of Science and Technology) kutatói különleges négylábú robotot fejlesztettek. A tetszetős külleműnek nem nevezhető gép felfelé mászik vas-, acélfalakon, és a mennyezeteken is elboldogul. Mindet úgy megmássza, mint az…
Szintet lépnek a robotkutyák.
A KAIST (Korea Advanced Institute of Science and Technology) kutatói különleges négylábú robotot fejlesztettek. A tetszetős külleműnek nem nevezhető gép felfelé mászik vas-, acélfalakon, és a mennyezeteken is elboldogul. Mindet úgy megmássza, mint az…
Jól veszi az akadályokat az olcsó négylábú robot
 A pittsburghi Carnegie Mellon Egyetem (CMU) és a Berkeley Kaliforniai Egyetem kutatói olcsó, aprólábú robotokat vezérlő rendszert fejlesztettek. A robotok fel- és lemásznak lépcsőkön – a lépcsőfokok kb. ugyanolyan magasak, mint ők –, sziklás, egyenetlen, meredek, csúszós és más nehéz terepeken is…
A pittsburghi Carnegie Mellon Egyetem (CMU) és a Berkeley Kaliforniai Egyetem kutatói olcsó, aprólábú robotokat vezérlő rendszert fejlesztettek. A robotok fel- és lemásznak lépcsőkön – a lépcsőfokok kb. ugyanolyan magasak, mint ők –, sziklás, egyenetlen, meredek, csúszós és más nehéz terepeken is…
Új algoritmusrendszerrel a vadonban is futnak a négylábú robotok
 Egy, a San Diegói Kaliforniai Egyetem által vezetett csoport négylábú robotok kihívásokkal teli terepeken történő sétáját, futását, statikus és mozgó akadályok elkerülését biztosító algoritmusrendszert fejlesztett.
A teszteken a rendszer homokos, kavicsos, göröngyös terepen, ágakkal és lehullott…
Egy, a San Diegói Kaliforniai Egyetem által vezetett csoport négylábú robotok kihívásokkal teli terepeken történő sétáját, futását, statikus és mozgó akadályok elkerülését biztosító algoritmusrendszert fejlesztett.
A teszteken a rendszer homokos, kavicsos, göröngyös terepen, ágakkal és lehullott…