
A „százlábúak” gyors, ingadozó járásukról ismertek. Tíz vagy többszáz lábukkal bármilyen terepen áthaladnak. Amikor száguldani látjuk őket, az emberi mozgástól nagyon eltérő állatokat látunk. A mi mozgásunkat nagyrészt a tehetetlenség határozza meg – ha meglendítjük a lábunkat, nyomatékot helyezünk rá, és haladunk előre. Ha viszont egy százlábú nem hadonászik többé a végtagjaival, azonnal vége is a mozgásnak.
Látva, hogy a sok láb mennyire hasznos a helyváltoztatásban, a Georgia Technológiai Intézet kutatói a százlábúak által inspirált elméletet dolgoztak ki a többlábas mozgásról, robotmodelleket fejlesztettek, és megállapították, hogy a redundáns lábakkal a gépek nehéz terepen, kiegészítő érzékelő- és vezérlőtechnológia nélkül is mozgásképesek.
Mivel valóban bonyolult, göröngyös közegben is működnek, változatos területeken, például a mezőgazdaságban, az űrkutatásban, de katasztrófahelyszíneken végzett kutatási és mentési műveletekben is alkalmazhatják őket.
A kutatók Claude Shannon a jelek megbízható továbbítását is vizsgáló kommunikációelméletéből szintén merítettek: ha az üzenetet A pontból B pontba akarjuk zajos vonalon elküldeni, akkor nem analóg, hanem diszkrét digitális egységekre szedett jelzésekként, megfelelő kóddal ellátva kell továbbítani.
Ezért döntöttek a sok (négy, hat, nyolc, sőt, tizenhat) láb mellett.
A térbeli redundanciából indultak ki: ha lábpárokkal bővítik a robotot, a gép jobban mozog nehéz terepen. Ez a redundancia a környezet értelmezésében segítő szenzorok nélkül is sikeressé teszi a lábakat. Ha az egyik akadozik, a többi folytatja a mozgást, a rendszer „zajos” közegben is elviszi magát A pontból B pontba.
Fejlett kétlábú robothoz sok érzékelő kell, a Mars felderítésekor vagy romok közötti túlélők megtalálásához viszont korlátozott érzékelő-képesség mellett is működniük kell a gépeknek. Ráadásul a szenzorok drágák és törékenyek, vagy a környezet gyors változása nem teszi lehetővé hatékony kommunikációjukat.
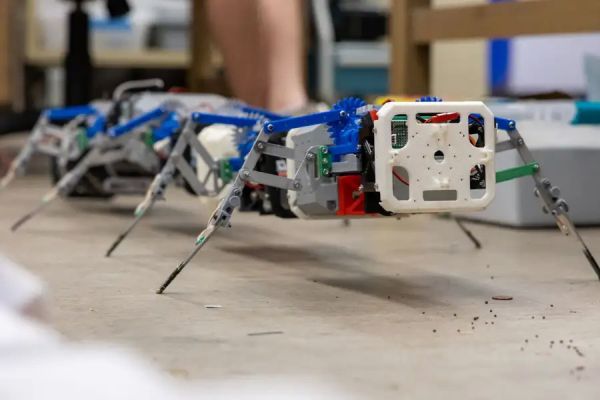
A robotot laborban és valódi környezetben, lábainak számát váltogatva tesztelték. Minél több lába volt, annál ügyesebben mozgott, és a valóvilágban is több tereptípussal elboldogult.




