
„Okos” műlábak segíthetnek végtagjukat elvesztett személyeknek a természetes járás visszanyerésében. Általában a lábat előre meghatározott ütemben előre mozdító robotikus szenzorok és algoritmusok vezérletével érik el ezt. MIT (Massachusetts Institute of Technology) kutatók szerint viszont jobb lenne, ha idegrendszerükkel teljes mértékben kontrollálhatnák a végtagot.
Csúcstechnológiás robotlábbal összekombinált kísérleti sebészeti beavatkozás lehet a megoldás, így lehet az adott személy idegrendszere által irányítva, teljesen visszanyerni a természetes járás képességét. Az eljárással összekapcsolják a végtag megmaradt részének izmait, a páciens pontos valósidejű visszajelzést kap a műláb séta közbeni pozíciójáról.
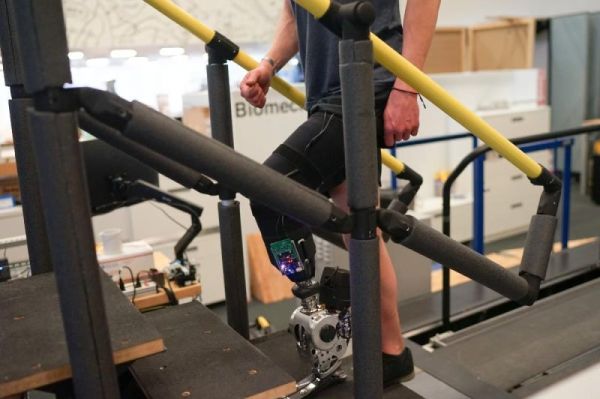
Eddig hét betegen végezték el a műtétet, és mindegyik gyorsabban jár, lépcsőn természetesebben megy, akadályokat szintén természetesebben kerülnek el, mint a hagyományos amputáción átesettek. Ennyit jelent, ha a mozgást robotikus kontrollalgoritmus helyett az emberi idegrendszer vezérli.
A kar- és lábmozgások túlnyomó többségét felváltva kinyúló és összehúzódó izompárok szabályozzák. A hagyományos térd alatti amputáció megzavarja ezeknek az összepárosított izmoknak az interakcióit, így az idegrendszer nehezen követi és irányítja a mozgást. Ezért problémás a műlábhasználat: a beteg nem érzékeli pontosan a láb térbeli elhelyezkedését, a járás kialakításában muszáj robotvezérlőkre és érzékelőkre hagyatkoznia.
Az MIT-kutatók speciális interfészt fejlesztettek a teljes neurális kontrollhoz. Izompárok elvágása helyett az izmok két végét az interfész köti össze, ezért a láb megmaradt részén dinamikusan tudnak egymással kommunikálni. A beavatkozás amputáció közben és után is elvégezhető.
Az így kezelt lábak az eredetihez hasonló elektromos jeleket, az elektromos jelek utasításokat generálnak, járás közben pedig visszajelzéseket kapnak. A páciens a művégtagot irányítja, a visszajelzés alapján pedig automatikusan javít a mozgáson.




