Egy dón akkor hasznos, ha gyors. Keressen túlélőket katasztrófa sújtotta terepen, vizsgáljon valamilyen épületet, szállítson csomagot, korlátozott kapacitású elemei miatt feladatait a lehető legrövidebb időn belül kell elvégeznie.
Előfordulhat, hogy egy sor „úti pont”, például ablakok, szobák vagy speciális helyszínek tanulmányozásával, minden egyes résznél a legmegfelelőbb útvonal, az optimális gyorsulás és lassulás kiválasztásával abszolválja a feladatot.

A drónokat vezérlő legjobb humán pilóták remek munkát végeznek ezen a téren, az algoritmusokat az eddigi összes versenyen legyőzték.
Mindeddig, mert a Zürichi Egyetemen (UZH) a négypropelleres (kvadrokopter) drónok leggyorsabb útvonalát megtaláló algoritmust fejlesztettek. Az algoritmus két világklasszis pilóta felett diadalmaskodott egy kísérleti versenypályán.
„Újdonsága, hogy elsőként generál a drón korlátait teljesen figyelembe vevő, időoptimalizált útvonalat” – magyarázza a fejlesztéseket vezető Davide Scaramuzza.
A korábbi munkák vagy a kvadrokopter rendszer, vagy a repülési útvonal leegyszerűsítésén alapultak. A zürichi kutatók alapötlete a speciális úti pontok közötti szakaszok kijelölése helyett, az úti pontokon történő átmenetel volt. Az algoritmus nem mondja meg a drónnak, hogy hogyan és mikor csinálja meg. Csak arra utasítja, hogy megcsinálja.
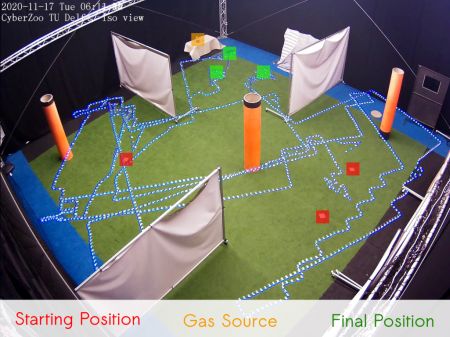
Az MI és a két humán pilóta ugyanazt a drónt vezérelte. A drón mozgásának érzékeléséhez, valósidejű tartózkodási helyének beazonosításához az algoritmust segítő kamerákat használtak. A sportszerűség szellemében, a humán pilóták is gyakorolhattak a versenypályán.
Az algoritmus azonban nyert: az összes körben gyorsabb, teljesítménye következetesebb volt. Ez azért nem meglepő, mert mihelyst megtalálja a legjobb útvonalat, utána – ellentétben az emberrel – annyiszor ismétli meg ugyanazt, ahányszor csak akarja.
Mielőtt a kereskedelemben forgalmaznák, meg kell oldani, hogy kevesebb számítással dolgozzon, mert az optimális útvonalat egy óra hosszat latolgatta, ráadásul végig külső kamerák segítették, máskülönben nem oldotta volna meg a feladatot. A kutatók a jövőben külső helyett fedélzeti kamerákat terveznek használni.
A győzelem mindenestre megmutatta, hogy mire képes egy autonóm drón. Scaramuzza szerint algoritmusukat sok területen alkalmazhatják.