
Ha azt akarjuk, hogy a robotok egyre emberszerűbben viselkedjenek, meg kell találni a tervezés és a vezérlés közötti kényes egyensúlyt. Ügyességünk, komplex feladatok kezünkkel történő kivitelezése hosszú evolúciós folyamat eredménye.
Egy új robotkar fejlesztése szintén hosszú folyamat: a tervezés sok iterációs ciklusból áll, aztán jön a fizikai megvalósítás, majd az emberi intuíción alapuló kiértékelés.
Mivel feladat-specifikus robotkarokat nehéz kidolgozni, a legtöbb általános rendeltetésű. A mostani módszerek a sok érintkezést igénylő feladatokra történő tervezés és a gyártás gyakorlati korlátai között egyensúlyoznak.
Az MIT (Massachusetts Institute of Technology) kutatói új eljárást találtak ki robotkarok formájának és irányításának speciális feladatra való optimalizálásához. Szoftver módosítja a tervet, szimulálja a feladat végrehajtását, pontozza a tervezést és a vezérlést.
A feladatorientált optimalizálás széleskörű gyártási és raktározási alkalmazásokkal kecsegtet, amelyekben repetitív tevékenység megvalósítására, de a különféle munkákhoz különféle robotkarokra lenne szükség.
A rendszer működésének teszteléséhez a kutatók első lépésben földön lévő dobozt megfordító robotikus ujjat készítettek. Az ujjvég szerkezetét egy algoritmus úgy optimalizálta, hogy hátsó oldalába akadva, megfordítsa a dobozt.
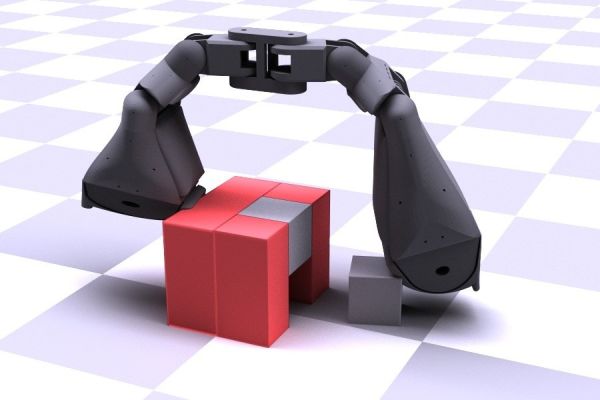
Összerakáshoz is fejlesztettek modellt – a kétujjas szerkezet egy kis kockát tett egy nagyobb tartóba. Az eltérő hosszúságú ujjak különböző méretű tárgyakat tudnak mozgatni.
Az ujj „ízületeinek” mindent leegyszerűsítő optimalizálása (ez a bevett gyakorlat) komplex feladatok elvégzéséhez szükséges komplex tervek megvalósításakor sok problémát jelent, korlátozza a lehetőségeket. Az MIT-s kutatók az úgynevezett „ketrecalapú deformációban” találták meg a megoldást – egy alakzat formája valósidőben megváltoztatható, eltorzítható. Az algoritmus automatikusan módosít a ketrecen, természetesebbé, a komplex robotujj számára könnyebben kezelhetővé teszi azt.
A kar tervezéséhez és vezérléséhez a kivitelezést pontozó szimulátort is fejlesztettek, és kiderült, hogy módszerükkel gyorsabban és jobb megoldások találhatók, mintha a robotikus tárgymozgatás megvalósításához eddig alkalmazott megerősítéses tanulásalapú algoritmusokkal dolgoznának.




