Egy újszülött zsiráf vagy gnú számára kockázatos kaland a világ, mert a leselkedő ragadozók kihasználnak minden alkalmat, hogy végezzenek az állatközösség leggyengébb tagjaival. Az evolúció eredményeként ezért tudják használni pár percen belül a lábukat.
Evolúciójuk régóta inspirál biológusokat, robotikusokat, köztük a Dél-Kaliforniai Egyetem mesterséges intelligenciával vezérelt állati inakhoz hasonló robotlábat fejlesztő kutatóit. A lábat hiába gáncsoljuk el, a következő lépésre akkor is feláll. Különlegessége, hogy explicit programozás nélkül képes rá.
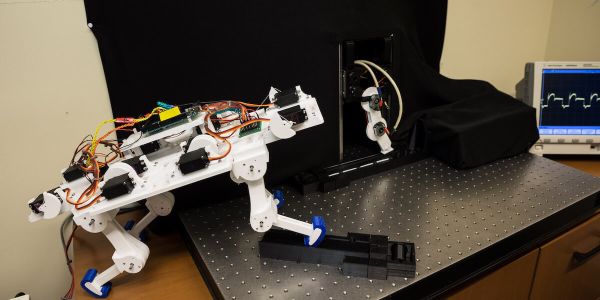
Élővilág által ihletett algoritmusával tanulja meg 5 percen belül a tennivalókat, aztán újabb feladatokhoz alkalmazkodik. Más gépitanulás-alapú rendszerekkel ellentétben, teendőit nagyon gyorsan elsajátítja.
A láb véletlenszerű mozgásával a robot belső térképet készít végtagjairól, a végtagok és a környezet közötti interakciókról. Menet közben, előzetes vagy párhuzamos szimuláció nélkül tanul. Ez azért fontos, mert programozók ugyan sokféle, de nem az összes lehetséges forgatókönyvet jelezhetik előre és kódolhatják gépekbe, amelyek így (minden lehetőség ismerete nélkül) előbb-utóbb törvényszerűen hibázni fognak.

Az új robot viszont nem, mert magától talál megoldást, ami először valószínűleg nem tökéletes, viszont akárhányszor az adott szituációba kerül, mindig javít rajta.
A kutatók járásminták kidolgozásával fejlesztenek egyedi mozgású robotokat. Személyekhez hasonlóan, ezek a gépek is felismerhetők a járásukról. Korlátolt gyakorlati tapasztalataik alapján találnak megoldást problémákra, a megoldások „személyes szokásaikká”, „személyiségük” részévé válnak. Az egyik kecsesen, a másik lustán, a harmadik peckesen jár, és így tovább.
A fejlesztés sokat segíthet az emberi mozgás jobb megértésében, komplex és változó környezeti feltételekre reagáló művégtagok, exoskeletonok (külső testvázak) és mozgássérülteket segítő (assistive) más technológiák, világűrben és keresési-mentési műveleteknél bevethető robotok építésekor.
Ha a robot meg tud tanulni szokásokat, akkor a felhasználó szokásait, köztük a legújabbakat is képes elsajátítani, majd utánozza mindennapi mozgásstílusát.