
Egyes kutatók szerint a mesterséges intelligencia magasabb szinten áll az emberi értelemnél a felügyelet melletti, ellenőrzött tanulásban (supervised learning), de ez csak akkor érvényes, ha nagy mennyiségű felcímkézett adatot használ speciális feladatok kivitelezéséhez.
Csak felügyelt gépi tanulásnál azonban nehéz emberszintű intelligenciáról beszélni. Az ok egyszerű: egy robot a mindenfajta szenzorikus, érzékszervi tevékenységéhez szükséges összes ellenőrzött címkézett adatot képtelen ezzel a módszerrel beszerezni.

Tomoaki Nakamura, a tokiói Elektro-Kommunikációs Egyetem (UEC) tanára és munkatársai az ismeretekhez az emberhez hasonló módon hozzájutó, beszerző robotok kivitelezéséről folytatnak kutatásokat. Meggyőződésük, hogy a robotoknak rendkívül fontos a környezet megértése.
Márpedig a környezetet saját szenzorikus információik strukturálásával érthetik meg. A megértési folyamat akkor működik igazán, ha az ehhez szüksége gépi tanuláshoz nem kell felügyelet.
Jelenleg a felügyelt tanulás sokkal gyakoribb, mint a felügyelet nélküli. A kettő közötti legfőbb különbség, hogy az előbbinél a kimenet eleve ismert, mint amikor egy diák tanárától tanul. „Csak” a folyamatot kell kitalálni, hogy az inputból hogyan lesz output.
A felügyelet nélküli gépi tanulás ritkább, kevesebb az alkalmazás, viszont a tényleges gépi értelemhez inkább az ezzel a módszerrel gyakorló, önmagukat tanító mesterséges intelligenciákon vezet az út. Előzetesen nem ismerjük a kimenetet, a gép magától jön rá a bemenő adatokból.
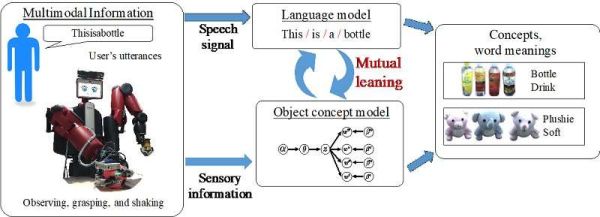
Nakamura robotoknak fogalmakat és nyelvet tanító algoritmust javasol. A robot másokkal folytatott kommunikáció közben jut hozzá tárgyakra vonatkozó és a nyelvvel kapcsolatos multimodális információkhoz. Az algoritmus ezen információk alapján segíti, hogy elképzelései legyenek a tárgyakról és nyelvet tanuljon. A megtanult fogalmakat összehasonlítják az ugyanazokról a tárgyakról alkotott emberi elképzelésekkel, és a hasonlóságokat megmutatják a gépeknek.
Nakamura módszert is dolgozott ki arra, hogy a robotok az emberi mozgás megfigyelésével hogyan tanuljanak meg mozogni. Ugyanez a módszer segíti őket az emberi interakció megfigyelésében, és a megfigyeltek alapján tudják megtanulni az interakció szabályait.
„A kutatás célja, hogy olyan robotokat fejlesszünk, mint az ember. Másik eredménye, hogy közelebb kerülünk az emberi intelligencia megértéséhez” – összegez Nakamura.




