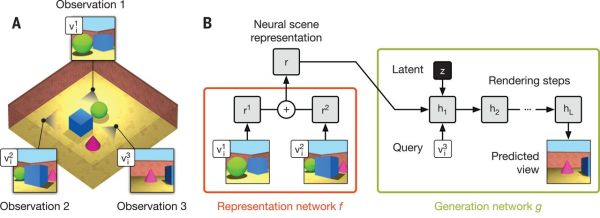
A Google Generatív Lekérdező Hálózata (Generative Query Network) anélkül találja ki, hogyan néznek ki tárgyak minden látószögből, hogy valójában látná az összest. Elég neki megmutatni néhány különböző perspektívát, és a részleteket komplett egésszé rendezi. A végeredmény olyan, mintha az összes szögből megtekintette volna a tárgyakat, pedig az algoritmus nem is elemezte mindet. A feladatot emberi felügyelet és gyakorlás nélkül kivitelezte.
Az új technológiával rengeteg idő spórolható meg, ráadásul robotok jobban, részletesebben megismerik a környezetüket. Elképzelhető, mekkora előnnyel járhat egy ilyen algoritmus például katonai műveletek helyszínén.

Az újfajta mesterségesintelligencia-rendszerrel az MI-kutatások egyik leginkább időigényes feladatától, képek és más médiaformátumok kézi címkézésétől és annotálásától mentesítenének szakembereket. Algoritmusok tanításához ugyanis szükség van ezekre az előzetes tevékenységekre. Ha viszont a számítógép magától kitalálja a szükséges információkat, akkor nincs többé szükség a rengeteg időt elrabló adatgyűjtésre és válogatásra.
A rendszer néhány különböző pillanatfelvételből komplett 3D beállítást tudott generálni. Objektumok formáját, méretét és színét egymástól függetlenül tanulta meg, majd a megtanultakat egyetlen modellben kombinálta össze. Mihelyst elkészült a modellel, a kutatók teljesen új jelenetek létrehozására használták az algoritmust. Úgy végezte a munkát, hogy el sem magyarázták neki, minek hol kell lennie.
A virtuális szobában végzett tesztek alapján a tudósok feltételezik, hogy fejlesztésükkel nagy lépést tettek az autonóm tanulás felé, és az algoritmusnak nincs szüksége hatalmas adatsorokra hozzá.
Ez a fajta MI többek között megfigyelőrendszerekben lesz alkalmazható, de egyelőre nem tartunk ott, mert nem elég kifinomult hozzá. Tárgyakkal elboldogul, emberi arcokkal viszont még nem. Ha hátulról lát minket, fogalma sincs, milyen az arcunk, a szemünk stb. Tárgyak közül is csak a legegyszerűbbekkel tesztelték, komplex objektumokkal, személyekkel nem próbálkozott eddig.
A kutatás első gyakorlati eredményei meglévő alkalmazások minőségjavulásában várhatók, például a környezetüket jobban értő futószalag melletti robotok pontosabb munkát végezhetnek. Általánosabb értelemben pedig közelebb kerülünk a környezetet az emberhez hasonló módon észlelő és felfogó, teljesen autonóm gépekhez.