Az önvezető autókat hatalmas mennyiségű adattal dolgozó gépitanulás-algoritmusok működtetik. Ha viszont képesek lennének úgy tanulni, mint a csecsemők a járást, azaz a környezetükben tartózkodók megfigyelésével és utánzásával, akkor jóval kevesebb közlekedési adatot kellene összegyűjteni.
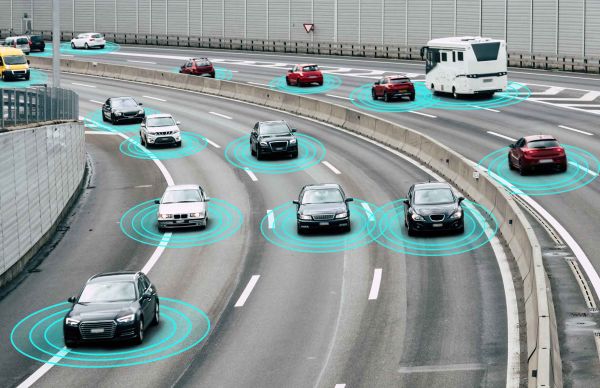
Eshed Ohn-Bar, a Boston Egyetem kutatója és Jimuyang Zhang, a felsőoktatási intézmény PhD-hallgatója ebből a gondolatból kiindulva, teljesen új módszert dolgoztak ki az önvezető autók tanulására. A jármű más járműveket figyel az úton, az algoritmus előrejelzi a környezetre adott reakcióikat, és a rendszer ezen információk alapján hozza meg a saját döntéseit. Így tanulja meg a biztonságos vezetést.
Elképzelésüket saját kutatási területük helyzete is inspirálta – a fejlesztésben érintett nagyvállalatok rengeteg, az önvezető autók tanulásához szükséges adattal rendelkeznek, viszont – megakadályozva a versenyt – azokat meg is tartják maguknak. Közben a kutatóközösségen belül egyre nő az adatmegosztás és az együttműködés iránti igény.
Mindegyik cég ugyanazt az utat járja be: szenzorokat pakolnak az autóba, irányításukhoz vezetőket fizetnek meg, adatokat gyűjtenek, majd a járművet vezetni tanítják. Ha az adatokat megosztanák, hamarabb fejlesztenének biztonságos önvezető autókat, a társadalom szélesebb rétegei profitálnának belőlük. Akkora adatmennyiségről van szó, hogy a problémát egyetlen cég sem oldja meg egyedül – érvel Ohn-Bar.
„Hiába van többmilliárd kilométernyi adat, a valóság annyira változatos, hogy ezek csak vízcseppek az óceánban. Egy hiányzó információminta viszont már önmagában is kockázatos vezetést, potenciális karambolokat okoz” – magyarázza.
Algoritmusuk felbecsüli a közeli autók nézőpontjait és vakfoltjait, majd madártávlati térlépet készít a környezetről. A térkép segítségével a jármű észleli az akadályokat, más autókat és gyalogosokat, megérti, miért változtat irányt, fékez stb. a többi. Kommunikál velük, összeütközés nélkül engedi előre, előzi meg őket.
Az autó az akár ember vezette, akár szintén önvezető többi jármű cselekedeteit referenciakeretekké alakítja át. Mivel a megfigyelés kulcsfontosságú, az adatmegosztás is az.
A kutatók két virtuális településen tesztelték a „nézz és tanulj” algoritmust. A terepek hiába különböztek egymástól, az idegháló nagyon kevés ütközéssel megúszta. Az esetek 92 százalékában ért célba. Míg a korábbi legjobb módszerekhez több órányi vezetési adat kellett, az övékéhez tíz perc elég volt.
A bíztató teszteredmények ellenére, nagyon sok kihívást kell még kezelniük: a megfigyelt járművek drasztikusan változó perspektíváit, a szenzorok pontatlan méréseit, különféle vezetői stílusokat stb.
Ohn-Bar szerint módszerük más területeken, például szállító robotoknál, drónoknál is alkalmazható.