A bizonytalan, például törmelékes, romos terepen közlekedő, mozgásukhoz a karjukat is használó robotok mostantól ezekben a közegekben is gyorsabban haladhatnak, mert egy, a Michigan Egyetemen fejlesztett új útvonaltervező algoritmus rövidebb ideig tartó adatfeldolgozás mellett szabványalgoritmusoknál háromszor eredményesebb a jó utak megtalálásában.
Az egyensúly fenntartásához a karjukkal manőverező gépek katasztrófa sújtotta vagy építési környezetben is nagyobb valószínűséggel elboldogulnak.
„Ha például leomlott házfalak között van egy robot, csak a lábával nem tud mindig egyensúlyozni, előrehaladni. Szüksége van új algoritmusokra, amelyek kijelölik, hogy hova tegye a lábát és kezét. A stabilitás megőrzéséhez ezeket a végtagokat mind együtt kell koordinálni” – magyarázza Dmitry Berenson, a kutatás egyik vezetője.
Lehetővé tették, hogy a robotok a sikeres útvonal kiszámítása előtt megállapítsák, mennyire nehéz a terep. Első lépésként, gépi tanulással tanították meg nekik kezük-lábuk használatát, helyes mozgatásukat, hogy ne veszítsék el az egyensúlyukat. Utána sokkal bonyolultabb új környezetben gyakorolhatták a megtanultakat.

Hagyományos algoritmusok terepbecslésével viszont – különösen nagyobb alapterületeken – sokáig tartott az útvonaltervezés. Ekkor találták ki az „oszd meg és uralkodj” módszert: azaz az utat nehezen és könnyebben bejárható szakaszokra osztották. Az előbbieken a gépek felhasználják a megtanultakat, az utóbbiakon viszont az egyszerűbb útvonaltervezés is működik.
A megoldás azért bonyolultabb, mint gondolnánk, mert nem egyértelmű a probléma pontos feldarabolása, és hogy melyik szakaszon melyik tervezési mód a jó.
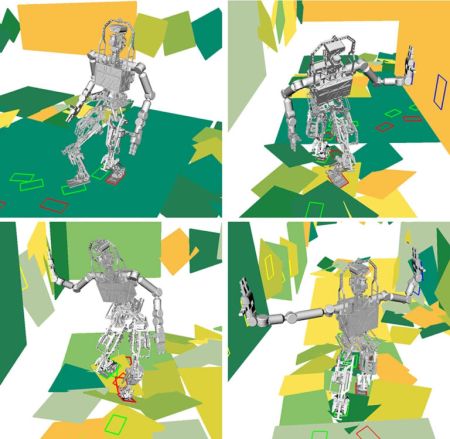
A teljes környezet mértani modellje kell hozzá, amihez a robot előtt felderítőmunkát végző drón szükséges. Virtuális környezetben, romos folyosón navigáló humanoiddal tesztelték, és a robot ötven kísérletből 84 százalékos eredménnyel célba ért. Amikor csak a hagyományos tervezést használta, 26 százalékot ért el, és a sikeres kísérletekben átlag két perc helyett három perc alatt ért célba.
A kutatók bemutatták, hogy az algoritmus a fizikai valóságban is működik. Kerekes robotot kétkaros torzóval szerelték egybe hozzá. Az útvonalterv 0,1 másodperc alatt készült el, hagyományos tervezéssel viszont 3,5-ig tartott.
Hamarosan elkezdenek a dinamikus mozgás stabilitásán dolgozni, hogy a robot majdnem olyan természetesen mozogjon, mint az állatok és az ember, amellyel gyorsabbá is válik.