A zsákmányát elkapó polip megfigyelése tapadókorongokkal kiegészített, ujjra felhúzható „kesztyűvel” irányítható puha robotcsáp fejlesztésére ösztönzött pekingi és szingapúri kutatókat.
Ügyességük és intelligenciájuk miatt a polipok régóta inspirálják a robotikát. Többszáz izommal rendelkeznek, annyi izmot és szabadságfokot képesek irányítani. A mozgás ilyen széles skálája és rugalmassága nagyon különbözik a hagyományos robotokétól.
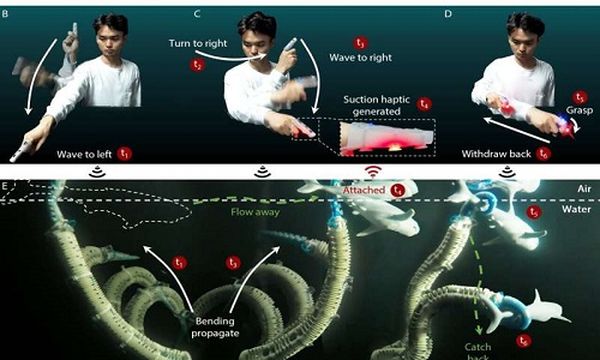
A kutatókat különösen a hajlításszerű mozgás érdekelte, ahogy a polip meglendíti a karját, és megragadja a zsákmányt. A mozdulat a kar tövénél kezdődik, és hullámként halad a csúcsig, körbeveszi a szerencsétlen halat vagy más élőlényt, tapadókorongokkal „ragad” rá, hogy a zsákmány ne menekülhessen, amikor a polip szájához kerül.
A polip karjai szokatlanok, szinte az agytól függetlenül működnek, nagyon kevés az agy és a kar közötti vezérlőjel. A kar idegrendszere úgy van elrendezve, hogy szekvenciálisan aktiválódjon, így pedig a feldolgozáshoz szükséges számítási tevékenység erősen korlátozott. Utánzásához a kutatóknak a hajlításszerű mozgást kellett matematikailag modellezni.
A robotcsáp puha szilikonból készült öt szegmensből áll, szobahőmérsékleten folyékony fém van beléjük ágyazva. Szabvány szilíciumchipekkel együtt a polip karjának idegrendszerét utánzó elektromos hálózatot alkotnak. A csáp hegyét tapadókkal és hőmérséklet-érzékelőkkel szerelték fel.
A rendszer önálló egységet alkot. Szenzorokkal felszerelt, nemcsak a kezelő ujjának mozgását, hanem a kéz és a kar dőlését is érzékelő, a mozgásokat a csáphoz továbbító, egyujjas kesztyűvel irányítható vezeték nélkül. A valódi polipkarhoz hasonlóan, az octobot (polip angolul octopus) célját elérve, eredeti hosszának másfélszeresére is kitágulhat.
A kutatók olyan szenzoros elemet akartak még a rendszerbe integrálni, amely lehetővé teszi, hogy a robot működtetője közvetlenül érzékelje a csáp hegyén lévő tapadókorongok összekapcsolódását. Ennek megfelelően a kesztyű belsejében viselője ujjához kapcsolódó három tapadókorong található. A robotcsáp tapadást „tolmácsolják”, hogy a kezelő fizikailag érezze, amikor a csáp elérte célját.
Octobot a teszteken elkapta a műanyagjáték-prédát; a robot levegőben és vízben egyaránt jól működött. A fejlesztéssel közelebb kerültünk a puha robotika egyik legfontosabb céljának, a polipok „beágyazott intelligenciájának” gépi megvalósításához.