Az Észak-karolinai Állami Egyetem kutatói személyek robotikus végtagjait vagy külső vázukat (exoskeleton) biztonságosabb és természetesebb járásban segítő szoftvert, összességében komplex keretrendszert fejlesztettek.
A masszív mesterségesintelligencia-algoritmusokkal megerősített rendszerbe gépi látást, lábvezérlést is integráltak. Az MI a bizonytalanság kezelésében segít, lehetővé téve, hogy a felhasználó változatos terepeken is elboldoguljon. Maga a szoftver meglévő hardverre telepíthető, nem kell hozzá külön újat fejleszteni hozzá.
Az alsó végtagok robotprotéziseinek az adott terep függvényében különféle viselkedésformákat kell kidolgozniuk. A keret garantálja, hogy az MI előrejelezze: a felhasználó milyen terepen fog mozogni, majd az előrejelzéshez kapcsolódó bizonytalanságot számszerűsítve, a döntéshozáshoz rendeli azt.
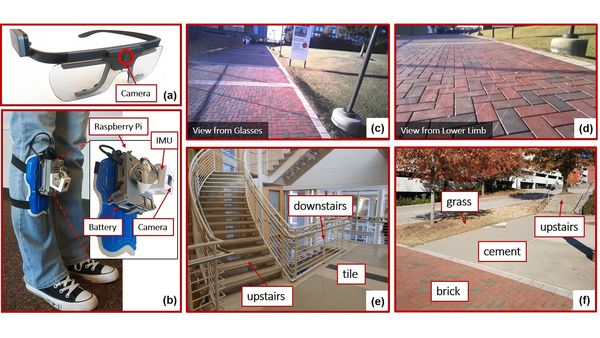
A kutatók hat tereptípusra összpontosítottak: csempe, tégla, beton, fű, emelet, földszint. A végtagprotézis viselkedését valamennyin finomhangolni kell.
Ha túl nagy a bizonytalanság, az MI-t semmi nem kényszeríti megkérdőjelezhető döntés meghozatalára. Helyette vagy értesíti a felhasználót, hogy nem biztos a cselekvés sikerében, vagy „biztonságos” módra vált.
A rendszer „környezeti kontextus” kerete egy hardverelemet, az alsó végtagi protézisre szerelhető kamerát is tartalmaz. A legnagyobb újítás azonban az MI.
„Az eddigieknél jobb megoldással álltunk elő a mélytanulás rendszerek betanításával kapcsolatban, hogy hogyan értékeljék ki és számszerűsítsék a bizonytalanságot. Így válik lehetővé a bizonytalanság beépítése a döntéshozásba. Munkánk nemcsak robotikus protézisekre, hanem bármilyen típusú mélytanulás-rendszerre alkalmazható” – jelentette ki Edgar Lobaton, az egyik fejlesztő.
A rendszer gyakoroltatásához, a kutatók a kamerát egészséges testű emberekre kapcsolták. Az illetők belső és külső terekben egyaránt sétáltak. Ezt követően amputált alsó végtagú személyeknek kellett ugyanazokban a terekben mozogniuk.
Az MI mindkét esetben jól működött, következő lépésben robotikus eszközökön tesztelik, és igyekeznek hatékonyabbá tenni. Cél, hogy kevesebb vizuális inputra legyen szüksége, és kevesebb adatot kelljen feldolgoznia.