
Sebészrobotok évente többmillió kockázatos műtétben vesznek részt világszerte. Munkájukat szigorú emberi felügyelet mellett végzik. Eddig legalábbis így volt, de most változhat a helyzet, önállósodhatnak a mesterségesen egyre intelligensebb gépek. Ellentétben az emberrel, az ő kezük egész biztosan nem remeg meg.
A Berkeley-i Kaliforniai Egyetem és a Stanford Egyetemről indult menlo Parki SRI International nonprofit tudományos kutatóintézet gépitanulás-rendszert tanított be nemrég egy kétkarú da Vinci sebészrobot irányítására. A feladatban az MI által vezérelt gép ügyességét, pontosságát és gyorsaságát tesztelték.
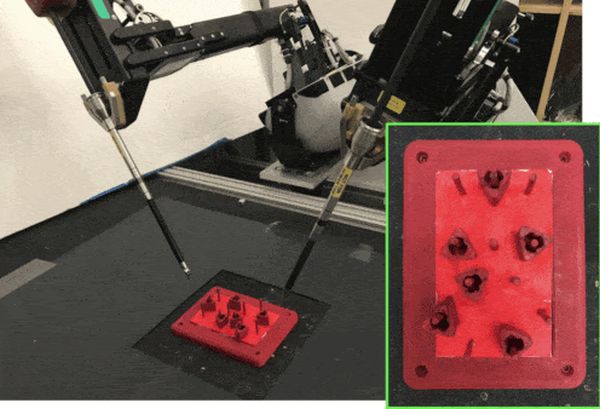
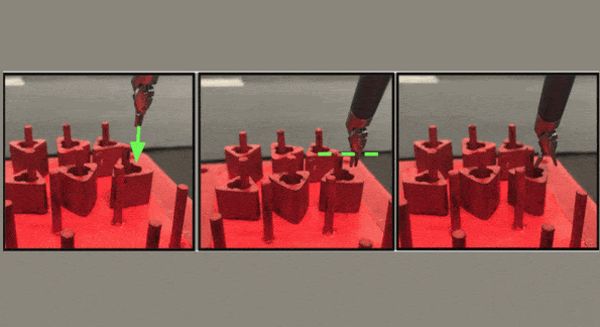
Az utánzásos tanulás során a rendszer begyakorolta, hogy apró műanyag-gyűrűket emeljen le egy lyukakkal ellátott, speciális deszkáról, és másikakra csúsztassa át azokat. A megoldandó feladat a sebészi gyakorlás része, a hasüreg vagy a medenceüreg diagnózisát és operációját a has felnyitása nélkül lehetővé tevő laparoszkópos folyamathoz tartozik. E folyamat során apró vágáson keresztül kamerát és más speciális eszközöket juttatnak a beteg testébe.
A kutatók négy konvolúciós ideghálót 180 RGBD (vörös, zöld, kék és mélység) videón gyakoroltattak. A mozgóképeken humán sebészek dolgoznak a robottal. Egy hibát és a kijavítását szemléltetik, és közben információkat közölnek a robot ízületeinek helyzetéről.
A rendszer megtanulta, hogyan kivitelezze a feladatot, az idő múlásával viszont egyre pontatlanabbá vált. A robot végtagjait irányító kábelek megnyúltak, és a modell így már könnyebben elvétette a célpontjait.
A fokozatosan kialakuló pontatlanságot ellensúlyozandó, a kutatók másfajta ideghálót is gyakoroltattak. A robot ízületeinek helyzetét bemutató mozgásmegragadásos (motion capture) anyagot használtak hozzá. A gép végül önállóan kivitelezett véletlenszerű mozdulatokat.
Az összekombinált két modell a műanyag-gyűrűs feladatban végül ügyesebbnek, pontosabbnak és gyorsabbnak bizonyult, mint az emberek.




