Képzeljük el, hogy nehéz tárgyat, például csőkulcsot fogunk meg egy kézzel. Valószínűleg nemcsak az ujjvégekkel, hanem teljes ujjainkkal fogjuk. A bőrünkben lévő, mindegyik ujjunk teljes egésze mellett futó szenzorikus receptorok a megfogott tárgyról küldenek információt az agyban.
Egy robotkézben tapintási szenzorok kamerákkal szereznek infókat a megfogott tárgyakról. Kicsik és laposak, gyakran az ujjbegyekben helyezkednek el. Ezek a robotok – ellentétben az emberrel – csak az ujjbegyet használják tárgyak megragadására, jellemzően csípőmozdulattal. Így viszont korlátozottak a gép által végrehajtható feladatok.

Az MIT (Massachusetts Institute of Technology) kutatói kamera-alapú érintőszenzort fejlesztettek. Az érzékelő hosszú, ívelt, alakja olyan, mint az emberi ujjé. Nagyobb területen is képes nagyfelbontású érintőérzékelésre. A GelSight Svelte nevű szerkezet két tükörrel veri vissza és töri meg a fényt. Az érzékelő alján lévő egyik kamera mindent lát a teljes ujj mentén.
A rendszert rugalmas gerinccel alakították ki. Mérik, hogy a gerinc mennyire hajlik meg, amikor az ujj hozzáér egy tárgyhoz. Ebből számítják ki a szenzorra kifejtett erőt.
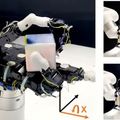
Az érzékelők, az emberhez hasonlóan nehéz tárgyakat megmarkoló robotkar építéséhez használhatók. Ilyenkor mindhárom ujja teljes érzékelőterületét használja. A kéz természetesen a hagyományos robotmarkolóknál megszokott szorítófogásokra is képes.
Mivel az új szenzor alakja olyan, mint az emberi ujjé, különböző feladatok különféle markolásmódszereihez használható, azaz nem egyetlen technikát alkalmaz mindenre.
A szenzor új lehetőségeket nyit meg tárgyakat módosító, robotokkal végzett feladatokban.