
Robotok ma már élelmiszerekkel is érintkeznek, egyes háztartási vagy ipari szerkezetek elvileg zöldségeket és gyümölcsöket is képesek szeletelni. A gyakorlatban viszont sokat hibáznak.
A múltban a fejlesztők komoly nehézségekkel szembesültek, ha azt akarták, hogy gépeik felvagdossanak tárgyakat, élelmiszereket. Alig van két egyforma tárgy, és a ma működő rendszerek nehezen vagy egyáltalán nem tudják kezelni az eltéréseket.

A Dél-kaliforniai Egyetem (USC) és a Nvidia kutatói erre a problémára (is) dolgoztak ki hatékony megoldást. Robotok vágótevékenységéhez fejlesztettek a késre kifejtett nyomást pontosan reprodukáló, zöldségeket és gyümölcsöket szakszerűen szeletelő szimulátort.
Mivel emberi szövet vágására szintén alkalmas, a rendszer komoly orvosi lehetőségekkel kecsegtet. A tapintásra adott reakció javításával, sokat segíthet sebészeknek, biztonságosabbá tehet műtéteket. Ezért is fontos a vágás hajszálpontos modellezése.
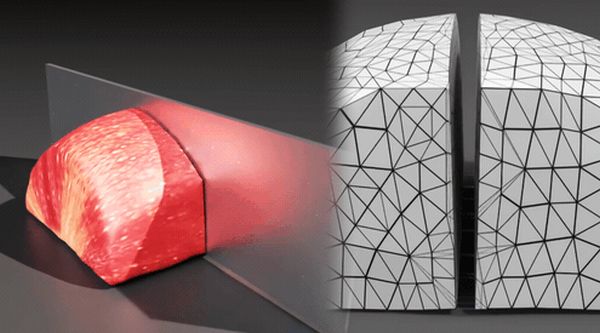
A kutatók egyedi megközelítést dolgoztak ki a vágás szimulálásához. Hálóval reprezentált rugókat tettek az elvágandó tárgy két fele közé. A kés hálóra kifejtett nyomásának hatására, a nyomás mértékével arányosan, a rugók fokozatosan elgyengültek.
A szimulátort ez a képessége teszi különlegessé. Különbséget tud tenni az erőkifejtések között, így pedig – összhangban a tényleges mérésekkel – finomhangolhatók a szimulációs paraméterek.
„Munkánk azért fontos, mert szűkíti a valóság és a gép tevékenysége közötti különbségeket, megoldást kínál a mai robotika egyik nagy kihívására. Enélkül a robotok soha nem törnének ki a szimulációból a valóságba ” – magyarázza Eric Heiden, az USC PhD-hallgatója, a kutatást ismertető tanulmány elsőszámú szerzője.
A képességek konkrét helyzetekbe történő átviteléhez, a szimulátornak valódi rendszert kell modelleznie. Az egyik kísérlet során, fizikai robot adataival dolgozva, nagyon pontos előrejelzések készültek a kés tényleges mozgásáról. Jelenleg a rendszer valódi robotokra alkalmazásán dolgoznak.




