Hiába nő a kereslet, nincs elég jól képzett, tehetséges mesterségesintelligencia-szakember. A munkaerőhiány miatt az alkalmazók egyre magasabb fizetéseket kínálnak, így próbálják magukhoz csábítani a szükséges képességekkel és tapasztalattal rendelkező munkakeresőket.
A kereslet növekedéséről, a kínálat szűkösségétől mindent elárul, hogy a nagy technológiai cégek is kevesebb új alkalmazottat vesznek fel.
A 2023-as AI Index szerint (a mezőgazdaság, az erdőgazdálkodás és a vadászat-halászat kivételével) a tavalyi amerikai álláshirdetések 1,9, a 2021-esek 1,7 százalékának volt köze az MI-hez. Az utóbbi öt évben megháromszorozódott az MI területen vezető állást betöltő személyek száma. A Világgazdasági Fórum előrejelzése alapján az MI- és gépitanulás-szakértők iránti igény negyven százalékkal nőhet 2030-ig.
Az amerikai álláshirdetők hat számjegyű éves kereseteket kínálnak, de egy esetben a felajánlott bér a hét számjegyet is elérte.
Az Indeed „segítségre van szükség” oldalon évről évre száz százalékkal nő a generatív MI jellegű álláshirdetések száma, miközben összesítve csökken a munkaerő-kereslet. Technológiai és nem technológiai cégek egyaránt magas kereseteket kínálnak MI-szakembereknek.
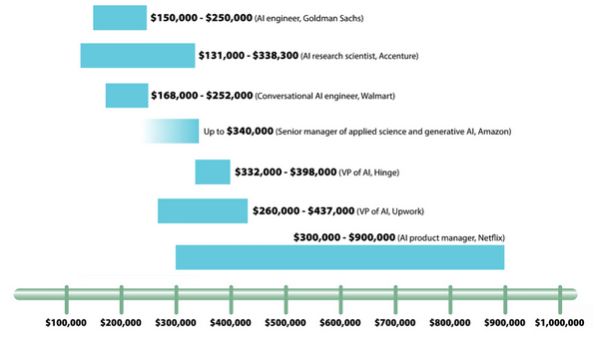
Egy átlagos gépitanulás-termékmenedzser éves bére 143 ezer dollár. Más országokban általában kevesebb. „Haladó” MI-kutatók keresete 131 és 338 ezer dollár között variálódik. A Goldman Sachs 150 és 250 ezer közötti összeget, plusz nem pontosított bónuszt kínál. A Walmart 168 és 252 ezer között fizet egy, a beszélgetésre fókuszáló MI fejlesztőcsapatban betöltendő posztért.
Vezetők esetében emelkednek a számok. Az Amazon 340 ezret kínál generatív MI felsővezetőnek, a Hinge randi app 332 és 398 között MI igazgatóhelyettesnek. A szabadúszókat és munkáltatókat összekötő Upwork-nél 260 és 437 ezer közötti dollárpénzt visz haza az MI igazgatóhelyettes.
A Netflix emelte a lécet, 300 és 900 ezer közötti összegért keresnek MI termékmenedzsert. A hirdetés nem kerülte el az állásukat a generatív MI-modellektől féltő és sztrájkoló hollywoodi forgatókönyvírók és színészek figyelmét.