A Facebookot évek óta, több fronton támadják. Sokak szerint monopóliumra törekszik, szét kellene darabolni, visszaél a közvagyonnal, a közösségi oldalnak valójában közműként kellene működnie. Mások egyes technológiák miatt, megint mások pedig összesen mindezekért kárhoztatják Mark Zuckerberg vállalatát.
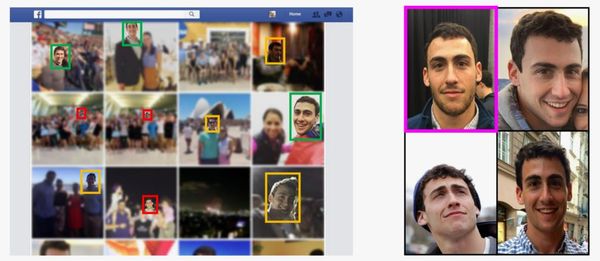
Az arcfelismerés hosszú ideje – nemcsak a Facebook ellen – az egyik legkeményebb támadási felület, alkalmazása ugyanis megkérdőjelezhető tevékenységeknek ad teret, és nem egyszer megsérti személyiségi jogainkat (privacy), lehetőséget ad illetékteleneknek arra, hogy beosonjanak az intim szféránkba.
A cég sokáig ignorálta az arcfelismerés káros hatásairól szóló bizonyítékokat, de végül beadta a derekát, és leállította a technológia feltöltött videókon, fotókon és a múltbeli vizuális anyagokkal foglalkozó Memories platformon történő használatát. Állítólag az egymilliárdnál több egyedi arcfelismerő sablonnak szintén véget vet. Egyébként a technológia több Facebook-funkciót működtet, és a napi 1,8 milliárd felhasználó fele használja is.
A Facebook lépése nem egyedi, a nagyvállalat követte más óriások, mint például az Amazon, az IBM és a Microsoft hasonló intézkedéseit. A trend nem sok jóval kecsegtet a technológia tömegszintű marketinges felhasználásának jövőjét illetően.
Az arcfelismerő funkciók kikapcsolása egyébként nem feltétlenül jelenti azt, hogy a cég teljes egészében felhagy a technika alkalmazásával. A mesterséges intelligencia és a gépi tanulás fejlődése szempontjából nagyon fontos DeepFace-t például megtartja, sőt, természetesen továbbfejleszti. Az eszköz személyazonosság-hitelesítésnél, csalások megelőzésénél tesz komoly szolgálatokat, és ezért nagyon meggondolatlan, felelőtlen húzás lenne felhagyni vele.
Miközben a techóriásokat sok oldalról támadják, és megoldásaik mérsékeltebb használatát követelik, addig új szereplők, kisebb cégek próbálkoznak és nyomulnak az arcfelismerésben. Az így sokkal töredezettebbé váló piacon nehezebb követni a technológia használatát, a valós és a potenciális visszaéléseket.
A legcélszerűbb az átgondolt szabályozás, az összes érintett vállalat által elfogadott általános szabályok és szabványok betartása lenne.