Az önvezető autókhoz mesterségesintelligencia-szoftvereket fejlesztő cambridge-i (Egyesült Királyság) Wayve szerint nem elegendők az ezekhez a járművekhez manapság alkalmazott technológiák, azaz a bonyolultságában is egyre kifinomultabb hardver, a részletes 3D térképek.
A cég bemutatott egy videót, amelyben a kétüléses elektromos Renault Twizy módosított változata tanulja, hogyan navigáljon autonóm módban az utakon. Megerősítéses tanulást alkalmaznak, tehát, ha jól, a célnak megfelelően viselkedik, jutalmat, ha rosszul cselekszik, akkor viszont büntetést kap.

„Az intelligens algoritmusok, és nem a még több szenzor, szabály, térkép az önvezető járművek kirakós játékának a hiányzó elemei” – magyarázza Amar Shah, a Wayve társalapítója, ügyvezető igazgatója.
A fejlesztési stádiumban lévő önvezető járműrendszerek túlnyomó többsége ugyanis aprólékos 3D térképeket alkalmaz a navigációhoz. A vállalatok egymással versengenek, hogy melyikük készít jobb térképeket.

Munkájukhoz komplex szenzorok, szenzorhálózatok, kamerák városi utakról, utcákról, autópályákról stb. gyűjtött adatait használják. A járműveknek szintén nagyon fejlett kamerákra és érzékelőkre van szükségük, hogy a térképeket rendeltetésszerűen használják.
Sajnos a térképkészítés egyrészt rendkívül munkaigényes, másrészt például az építkezések miatt gyakran kell frissíteni őket. Hiányosságuk, hogy a fejlesztőcégek a forgalmas utakra összpontosítanak, vidéki területekkel viszont lényegesen kevesebbet foglalkoznak.
A Wayve technológiája elavulttá teheti ezeket a 3D térképeket.
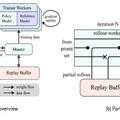
A bemutató Twizy-jére (az autó elülső részére) csak egy kamerát szereltek. (Önvezető autókon több van, a Tesláén például nyolc.) A kamera valósidőben juttatja el az információkat a Wayve megerősítéses tanulóalgoritmusát futtató fedélzeti grafikus feldolgozóegységnek (GPU). Ez az algoritmus vezérli a kormányt, a jármű gyorsulását és a fékezést. A tanulási folyamat közben humán vezető ül a volán mögött, és megállítja az autót, ha lemegy az útról, illetve más szabálytalan mozgást végez.
A vezető jutalmaz és büntet. Minél hosszabb ideig nem kell beavatkoznia, az önvezető autó annál nagyobb jutalmat kap.
A Twizy a bemutatón 20 perc alatt kitalálta, hogyan kell vennie a kanyarokat. A semmiből tanulta meg.
Ha a megközelítés beválik, a robotjárművek nem függenek többé 3D térképektől.