Képzeljük el, hogy szörnyű fényviszonyok mellett, gyors kamerával, széles látószögből veszünk fel mindent. Az embernek meg kell elégednie az evolúció során kialakult szemével, a gépi látás viszont folyamatosan lép át új határokat. Legutóbb Dél-Koreában, ahol egy kutatócsoport két kameratípust kombinált össze a gyorsan mozgó objektumok jobb követéséhez és bonyolult környezetek precíz 3D-s feltérképezéséhez.
Az első, eseményalapú kamera remekül rögzít gyorsan mozgó tárgyakat, állatokat, személyeket, míg a mindenirányú vagy halszem-optikás második elképesztően széles szögeket fog be.

A Koreai Tudomány és Technológia Intézet a fejlesztésnek otthont adó Vizuális Intelligencia Laborja szerint mindkét kameratípus tökéletes a számítógépes látáshoz. Az eseménykamera sokkal kisebb késleltetéssel működik, mozgás közben kevesebb az elmosódás, jóval nagyobb a dinamikatartománya, plusz energiahatékony is. A másik a sokkal tágabb szögekből begyűjtött képi infók miatt kiváló gép.
Az új, „eseményalapú, mindenirányú, több látószögű, sztereó” (EOMVS) kamerához 3D-s jeleneteket nagyon pontosan rekonstruáló szoftver is kell. A rekonstrukcióhoz általában különböző szögekből vesznek fel több képet. A koreai kutatóké is hasonló megközelítéssel dolgozik, képek helyett viszont 3D-s tereket rekonstruál a kamera által rögzített eseményadatokkal dolgozó program.
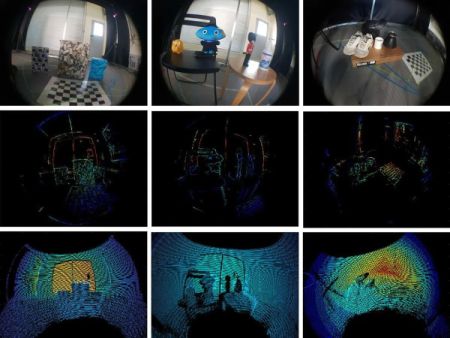
A kombinált kamerát a közismerten nagyon pontos LiDAR mérésekkel hasonlították össze. 145, 160 és 180 fokra is beállították. Kiderült, hogy az EOMVS rendszer szintén pontosan, mindössze három százalék hibarátával térképez fel 3D-s tereket. Még pocsék világítás mellett is lekövet szélsebesen mozgó objektumokat.
A kutatók szerint a 3D-s térképezés és a dróntechnológia összekapcsolása az EOMVAS legígéretesebb alkalmazása.
A kamera kereskedelmi forgalmazását, továbbfejlesztését tervezik. Most a rendszernek az adatok összekapcsolása és elemzése miatt tudnia kell, hogy pontosan hol van a kamera. Az új változat rugalmasabb lesz, mert a kamera pozíciójáról semmiféle előzetes információra nem lesz szükség. Mozgás közbeni elhelyezkedését folyamatosan felbecsülő algoritmust fejlesztenek hozzá.