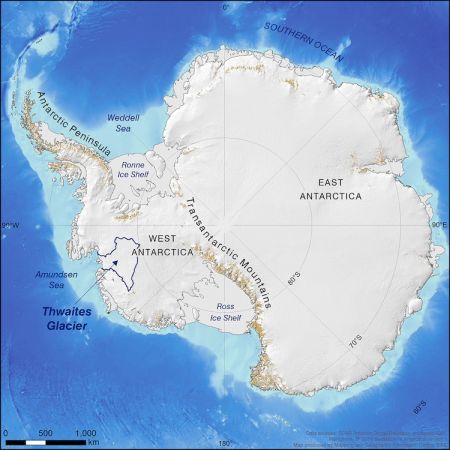
A sérülékeny antarktiszi gleccserek selfjegén – a parti síkságról a tengerbe nyúló jégtömegen (tengeri jégpajzs); a tenger fenekéig (a peremeken csaknem fenekéig) befagyott részen – végzett legújabb megfigyelések komoly repedéseket és hasadásokat tártak fel. Ezeken gyorsabb az olvadás, csökkentve a Florida-méretű gleccser kiterjedését, hozzájárulva a potenciális tengerszint-emelkedéshez – állapította meg a Cornell Egyetem nemzetközi együttműködésben résztvevő kutatócsapata.
A méréseket a távirányított Icefin vízalatti robot végezte a jégben hatszáz méter mélyre fúrt lyukon keresztül. A helyszín az a pont, ahol a Thwaites gleccser találkozik a Déli-óceánhoz tartozó Amundsen-tengerrel. A kontinensnek ez a nyugati része, az egyik leggyorsabban változó területe.

A robot fejlesztését közel egy évtizede, még a Georgia Technológiai Intézetben kezdték, korábban feltérképezetlen terepek, köztük földtörések vizsgálata is szerepelt a célok között. A keskeny fúrólyukon történő leereszkedéshez ceruzaformájú jármű kellett, átmérője a harminc centit sem éri el, hossza viszont majdnem négy méter. Manőverező eszközökkel, kamerákkal, térképező műszerekkel, az óceánáramlatok sebességét, a víz hőmérsékletét, sótartalmát és oxigénszintjét mérő szenzorokkal szerelték fel. Mindezek az infók szükségesek az olvadás ütemének megállapításához.
Icefin a negyedik generációnál tart, fejlesztését a NASA is finanszírozza. A klímamodell frissítésében, javításában játszhat szerepet, de az Antarktiszon megtanultakat később más jeges környezetekben, az Európa és az Enceladus holdakra induló missziók során hasznosíthatja.
A Thwaites legalább 2011 óta folyamatosan csúszik le az óceánfenék felé, az ottani selfjég alapja vékonyodik, bár nem olyan gyors tempóban, mint ahogy korábbi szimulációk sugallták. A meredek lejtős rések és a lépcsőszerű falak viszont jóval gyorsabban olvadtak kifelé.
Az antarktiszi selfjegek olvadásából keletkező víz jelentősen hozzájárul az óceánok szintjének emelkedéséhez. Icefin mérései új információkat szolgáltattak a viszonylag meleg óceánvíznek kitett gleccserek olvadási folyamatáról, a Thwaiters globális hatásairól.

A robot tevékenységének köszönhetően, nemcsak az olvadás mennyiségéről, hanem helyszínéről és mikéntjéről is tudunk. Ezek nagyon fontos tényezők a nyugat-antarktiszi változások megértéséhez. A melegedő gleccsereken repedések, hasadékok, teraszok láthatók, a melegebb víz beléjük hatol, leggyengébb pontjain támadva a Thwaitest.
A különlegesen komplex Icefin a lehető legközelebbről méri a folyamatokat, ennyire közelről egyetlen más eszköz sem végzett még hasonló munkát. Adatai alapján újra kell gondolni az óceáni jégolvadás mikéntjét.