 A modellkártyák sokat segíthetnek a felelősségteljes mesterségesintelligencia-használatban. Százezrek dolgoznak MI-funkciókat, köztük beépített modelleket tartalmazó felhőszolgáltatásokkal, és jobb, ha eleve tudják, milyen céllal fejlesztették az adott modellt, mik a korlátai stb. Mindezek…
A modellkártyák sokat segíthetnek a felelősségteljes mesterségesintelligencia-használatban. Százezrek dolgoznak MI-funkciókat, köztük beépített modelleket tartalmazó felhőszolgáltatásokkal, és jobb, ha eleve tudják, milyen céllal fejlesztették az adott modellt, mik a korlátai stb. Mindezek…
Az Neumann Társaság blogja a legfejlettebb infokom technológiákról
Jelenből a Jövőbe
Hogyan készítsen MI képet a mi macskánkról?
 A tipikus szövegből képet generáló mesterséges intelligenciák előállhatnak például egy macska, de nem a mi macskánk képével. Azért nem, mert a szöveges utasítást, a promptot nehéz olyan pontosan megadni, hogy a macskánkat a többi macskától megkülönböztető összes jegy benne legyen.
Nvidia- és…
A tipikus szövegből képet generáló mesterséges intelligenciák előállhatnak például egy macska, de nem a mi macskánk képével. Azért nem, mert a szöveges utasítást, a promptot nehéz olyan pontosan megadni, hogy a macskánkat a többi macskától megkülönböztető összes jegy benne legyen.
Nvidia- és…
Elfogynak az adatok
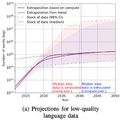 A big data korában eljuthatunk odáig, hogy a kínálat szintjén nem lesz annyi adat, mint amekkora a kereslet. A paradoxon oka egyszerű és logikus: egyre nehezebb kielégíteni az egyre „nagyobb étkű” gépitanulás-modellek szükségletét.
Az Epoch AI kutatói szerint a szöveges adatokkal már idén bajok…
A big data korában eljuthatunk odáig, hogy a kínálat szintjén nem lesz annyi adat, mint amekkora a kereslet. A paradoxon oka egyszerű és logikus: egyre nehezebb kielégíteni az egyre „nagyobb étkű” gépitanulás-modellek szükségletét.
Az Epoch AI kutatói szerint a szöveges adatokkal már idén bajok…
A felhasználó hangja alapján azonosítja a Parkinson-kórt és a Covidot egy app
 Egyes betegségek korai fázisában csak nagyon kevés bizonyosság van a szervezetben lappangó és lassan kifejlődő kórra. Nagyon kevés a jel, de mégis jelen vannak.
Az ausztrál Melbourne-i Királyi Technológiai Intézet két kutatást végzett, és az általuk fejlesztett algoritmusok személyek hangját…
Egyes betegségek korai fázisában csak nagyon kevés bizonyosság van a szervezetben lappangó és lassan kifejlődő kórra. Nagyon kevés a jel, de mégis jelen vannak.
Az ausztrál Melbourne-i Királyi Technológiai Intézet két kutatást végzett, és az általuk fejlesztett algoritmusok személyek hangját…
Ideghálók számolják ki az ukrán terményveszteséget
 Az orosz invázió előtt Ukrajna volt a földkerekség ötödik búza-exportőre. A háború miatt világszerte drasztikusan felmentek az élelmiszerárak, egyes régiókban akár éhínség is lehet. Az ukrán gabonatermést ért károk mértékének pontos felmérése segíthet a veszteség helyettesítését célzó stratégiák…
Az orosz invázió előtt Ukrajna volt a földkerekség ötödik búza-exportőre. A háború miatt világszerte drasztikusan felmentek az élelmiszerárak, egyes régiókban akár éhínség is lehet. Az ukrán gabonatermést ért károk mértékének pontos felmérése segíthet a veszteség helyettesítését célzó stratégiák…
Új algoritmusrendszerrel a vadonban is futnak a négylábú robotok
 Egy, a San Diegói Kaliforniai Egyetem által vezetett csoport négylábú robotok kihívásokkal teli terepeken történő sétáját, futását, statikus és mozgó akadályok elkerülését biztosító algoritmusrendszert fejlesztett.
A teszteken a rendszer homokos, kavicsos, göröngyös terepen, ágakkal és lehullott…
Egy, a San Diegói Kaliforniai Egyetem által vezetett csoport négylábú robotok kihívásokkal teli terepeken történő sétáját, futását, statikus és mozgó akadályok elkerülését biztosító algoritmusrendszert fejlesztett.
A teszteken a rendszer homokos, kavicsos, göröngyös terepen, ágakkal és lehullott…
Robot-világcsúcs száz méteres futásban
 Az Oregoni Állami Egyetem Agility Robotics cége által fejlesztett Cassie nevű kétlábú robot történelmet írt: kétlábú robotok közül eddig ő futotta le leggyorsabban a száz métert, ami hivatalos Guinness Világcsúcs.
Összehasonlításként, a férfi száz méteren Usain Bolt a csúcstartó 9,58 másodperccel,…
Az Oregoni Állami Egyetem Agility Robotics cége által fejlesztett Cassie nevű kétlábú robot történelmet írt: kétlábú robotok közül eddig ő futotta le leggyorsabban a száz métert, ami hivatalos Guinness Világcsúcs.
Összehasonlításként, a férfi száz méteren Usain Bolt a csúcstartó 9,58 másodperccel,…
Mesterséges intelligencia, mint szolgáltatás
 Egy-két éve, a nagy nyelvi modellekhez csak a trenírozásukhoz és alkalmazásukhoz szükséges, komoly számítási kapacitással rendelkező szervezetek férhettek hozzá. A felhőalapú szolgáltatásokkal ezek a modellek startupok és kutatók szélesebb körében is elérhetők, így pedig nyilvánvalóan több új…
Egy-két éve, a nagy nyelvi modellekhez csak a trenírozásukhoz és alkalmazásukhoz szükséges, komoly számítási kapacitással rendelkező szervezetek férhettek hozzá. A felhőalapú szolgáltatásokkal ezek a modellek startupok és kutatók szélesebb körében is elérhetők, így pedig nyilvánvalóan több új…
A lottón alapuló gépi tanulás védi meg a személyiségi jogokat
 Gépitanulás-modellek feladatok, például képosztályozás hatékony kivitelezésére történő begyakoroltatása többmillió, esetleg többmilliárd kép megismertetésével jár. Ekkora adatsor összegyűjtése komoly kihívásokkal jár. Egyes esetekben, például, ha személyiségi jogokról (privacy), mondjuk, orvosi…
Gépitanulás-modellek feladatok, például képosztályozás hatékony kivitelezésére történő begyakoroltatása többmillió, esetleg többmilliárd kép megismertetésével jár. Ekkora adatsor összegyűjtése komoly kihívásokkal jár. Egyes esetekben, például, ha személyiségi jogokról (privacy), mondjuk, orvosi…
Maszkon keresztül is olvas a szájról a következőgenerációs hallókészülék
 Egy, a Glasgow Egyetem kutatói által vezetett nemzetközi csapat maszkot viselő beszélők szájáról is olvasó rendszert fejlesztett. Munkájuk a következőgenerációs hallókészülékeket vetíti előre.
Ma a világ lakosságának öt százaléka, kb. 430 millió személy visel a hallását segítő technológiát. Ezek a…
Egy, a Glasgow Egyetem kutatói által vezetett nemzetközi csapat maszkot viselő beszélők szájáról is olvasó rendszert fejlesztett. Munkájuk a következőgenerációs hallókészülékeket vetíti előre.
Ma a világ lakosságának öt százaléka, kb. 430 millió személy visel a hallását segítő technológiát. Ezek a…